
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
About me
About me
Posts
给粤港机器人联合学院的ROS学习指引
Published:
学习ROS是一件痛苦并且快乐的事。just do it!
portfolio
Research work on robot reinforcement learning
Published:
After completing my undergraduate studies,I joined Professor Chen Changhao’s PEAK_Lab at the HongKong University of Science and Technology (Guangzhou) as a research assistant,where I am responsible for research on leggedrobots.Currently,I focus on the application of deep reinforcement learning in robot control and the whole-body control of robots,dedicated to enabling robots to accomplish a series of complex tasks through reinforcement learning.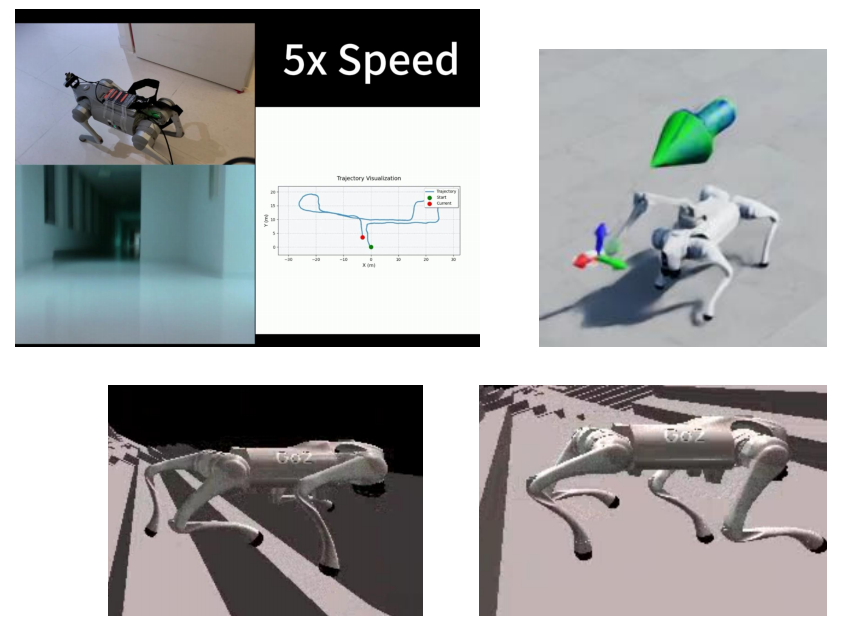
Development of dexterous hands
Published:
In the second semester of my senior year, I was fortunate to participate in the initial work of a startup company collaborating with laboratories from Harbin Institute of Technology, Shenzhen (HIT Shenzhen) and University of Science and Technology of China (USTC). As a robotic software engineer there, I specialized in ROS2 development and driver configuration (RS485/CAN) for a 22-DOF dexterous hand, along with the integration of the UR16e robotic arm. I led the development of ROS2 Jazzy/Humble versions, which included: - Motion control systems and sensor data processing pipelines - Communication module architecture for multi-device coordination
Emergency Response via Spherical - Ducted UAV Integration
Published:
In the last year of my undergraduate degree, I participated in the task of Project Design IV of the Guangdong-Hong Kong Robotics Academy, responsible for a flight control part that combines a spherical robot and a drone. This robot can shuttle through complex terrain and avoid obstacles by flying. It can not only conduct drone patrols in terrain such as forests, but also use the rolling characteristics of spherical robots to cross complex terrain areas. 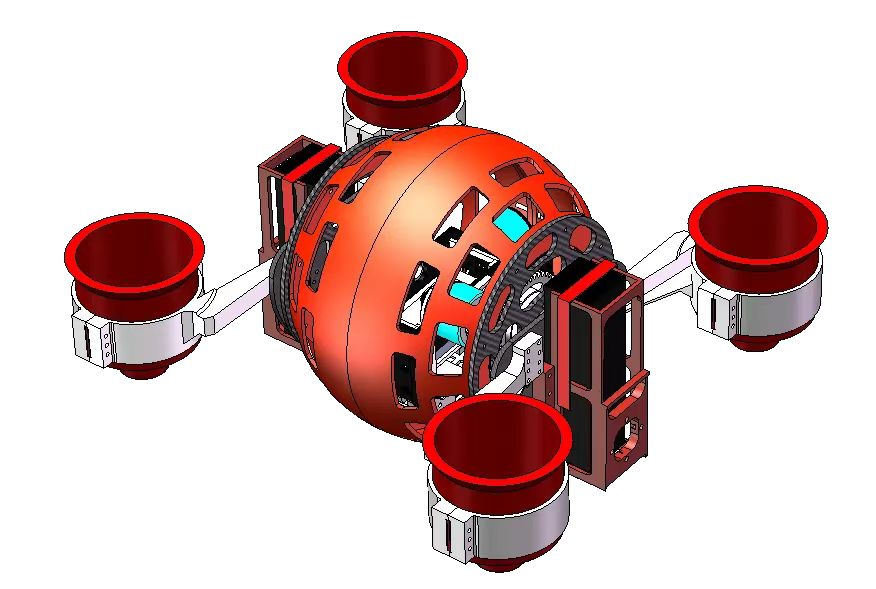
Robocon competition experience
Published:
In the two-year ROBOCON competition,I participated in the competition in two different capacities: team leader and technical advisor.During the 23rd season,I was involved in the development of control codes for rabbit and elephant robots,as well as the development of the ROS segment.In the 24th season,I was mainly responsible for the development of decision-making algorithms for autonomous robots.
By the way,our team won the national first, second and third prizes. It is particularly worth mentioning that we achieved the 2nd place in the national preliminary competition in 2023!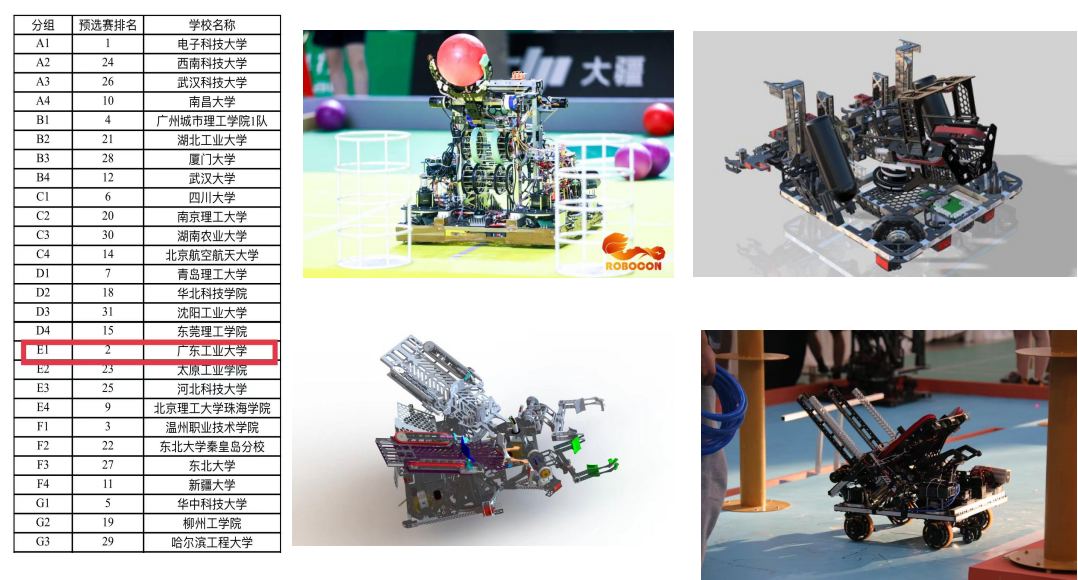
Robot Basic Competition:2D radar algorithm design and control code development
Published:
This is the selection competition of the Automation Academy for entering the Robocon team of the Robotics Academy. We use the traditional three-wheel omnidirectional wheel as the chassis, plus two U8 LITE as the friction belt motor. In the process, 2D radar is used to detect the cylinder, and finally, the radar automatically detects the cylinder alignment and launch score.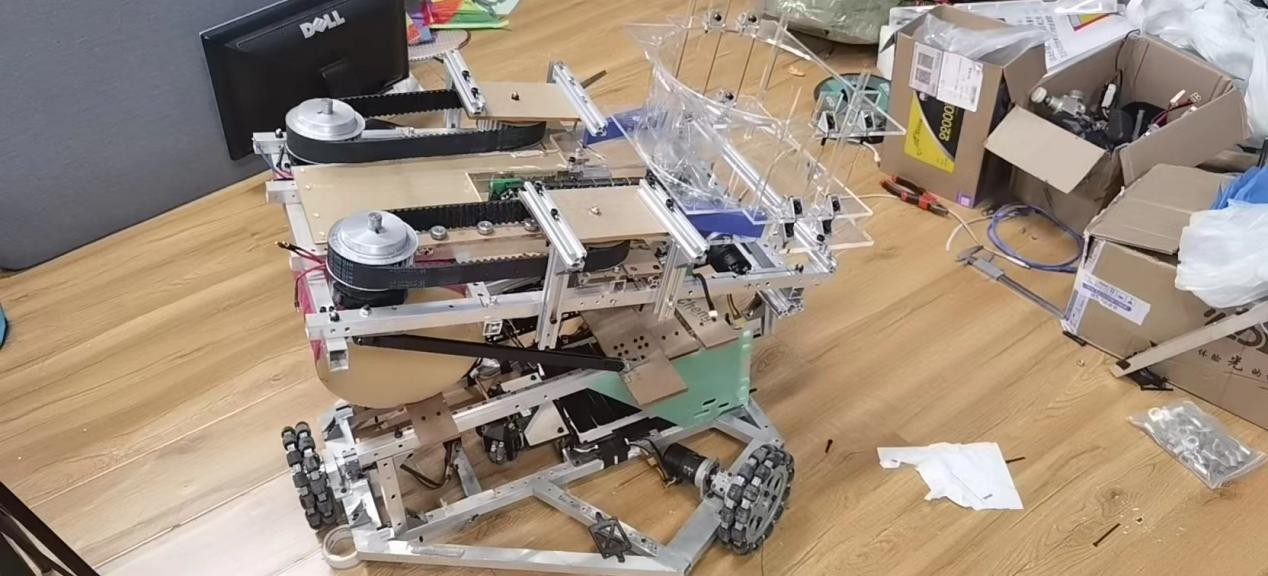
A sports and health analyzer based on CNN-LSTM
Published:
This project addresses the growing need for accessible foot health monitoring and early disease detection. Inspired by national policies promoting healthcare innovation, it leverages lightweight sensors and AI algorithms to identify foot deformities (e.g., flat feet) and systemic risks (e.g., Parkinson’s) through gait analysis. Unlike bulky clinical tools or basic wearables, our solution offers real-time insights, personalized advice, and health alerts, aiming to empower users with proactive care.You can click here to view our implementation effect.
Manipulator control,sensor collection,model building for smart med - arms
Published:
This is a laboratory project at Guangdong University of Technology. The purpose is to touch the mass through the robotic arm and judge the size of the mass. In the experiment, we used the Jaka robotic arm combined with a six-dimensional force sensor to slide the target object (pork nugget) at different speeds, angles, and depths. Finally, we combined the LSTM algorithm to perform a long-term sequence analysis of these data. Similarly, a feedback control can also be performed on the robotic arm based on these data.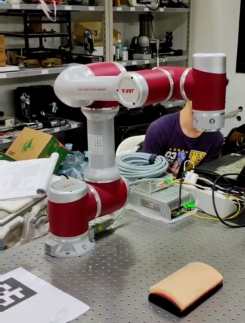
Deisgn of control program and visual solutions for logistics terminal delivery vehicles
Published:
This is the content of the second project design class of the School of Robotics. The purpose is to make a logistics trolley based on STM32, which can recognize traffic lights and walk logically, and identify designated blocks to arrive at designated locations for placement.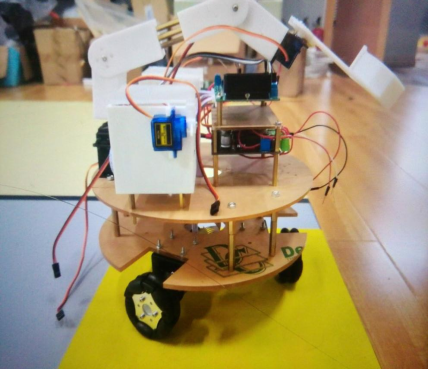
publications
Paper Title Number 1
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1).
Download Paper | Download Slides | Download Bibtex
Paper Title Number 2
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2).
Download Paper | Download Slides
Paper Title Number 3
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3).
Download Paper | Download Slides
Paper Title Number 4
Published in GitHub Journal of Bugs, 2024
This paper is about fixing template issue #693.
Recommended citation: Your Name, You. (2024). "Paper Title Number 3." GitHub Journal of Bugs. 1(3).
Download Paper
Paper Title Number 5, with math \(E=mc^2\)
Published in GitHub Journal of Bugs, 2024
This paper is about a famous math equation, \(E=mc^2\)
Recommended citation: Your Name, You. (2024). "Paper Title Number 3." GitHub Journal of Bugs. 1(3).
Download Paper
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.